
Grade 11Mechanics
find constraint equation between acceleration of the blocks m1, m2 and m3
find constraint equation between acceleration of the blocks m1, m2 and m3
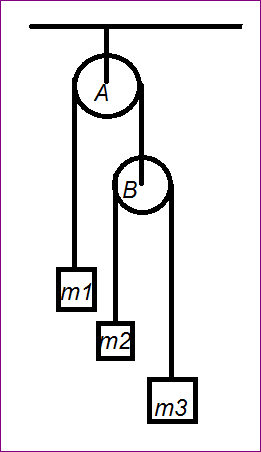


To derive the constraint equation between the accelerations of blocks m1, m2, and m3, we first need to understand the setup of the system. Typically, these blocks are connected by strings or pulleys, and their movements are interdependent. Let’s assume we have a scenario where m1 and m2 are hanging vertically, and m3 is on a frictionless surface connected to m1 and m2 through a pulley system. This is a common arrangement in physics problems involving pulleys.
In this setup, we can denote the accelerations of the blocks as follows:
Assuming the string connecting these blocks is inextensible, any movement of one block will directly affect the others. For instance, if m1 moves down, m2 must move up, and m3 will move horizontally. This relationship is crucial for establishing the constraint equation.
Let’s analyze the movements:
From the above relationships, we can express the accelerations in terms of each other:
Substituting a2 = -a1 into the equation for a3, we get:
a3 = (1/2)(a1 - a1) = 0.
This indicates that the horizontal acceleration of m3 is directly linked to the vertical movements of m1 and m2. Therefore, the constraint equation can be summarized as:
a1 + a2 + 2a3 = 0.
This equation encapsulates the relationship between the accelerations of the three blocks in the system. It highlights how the movement of one block influences the others, maintaining the constraints imposed by the inextensible string. Understanding these relationships is crucial for solving problems involving multiple connected bodies in mechanics.

Three identical balls are placed on a frictionless
horizontal surface touching each other. They stick to
each other because of adhesive. Another ball of same
radius and mass m is placed over the void created by
the three balls. Find the forces applied by the balls
kept on the floor to each other if the system remains
in equilibrium.
Last Activity: 9 Months ago
A car loaded with water having total mass 1000 kg moves on a straight horizontal Road starting from rest under the action of a force of 100 Newton. The water spills throw a small hole in the bottom at a rate of 0.1 KG per second the velocity of cart after 300 seconds is nearly.
11
21
31
41
Last Activity: 9 Months ago
Last Activity: 3 Years ago
Last Activity: 3 Years ago