WHY MOMENT OF INERTIA IS A TENSOR??
WHY MOMENT OF INERTIA IS A TENSOR??

araku valley , 16 Years ago
Grade 11
 Mechanics> TENSOR...
Mechanics> TENSOR...
WHY MOMENT OF INERTIA IS A TENSOR??
 1 Answers
1 AnswersHi
Tensors, defined mathematically, are simply arrays of numbers, or functions, that transform according to certain rules under a change of coordinates. In physics, tensors characterize the properties of a physical system, as is best illustrated by giving some examples (below).
A tensor may be defined at a single point or collection of isolated points of space (or space-time), or it may be defined over a continuum of points. In the latter case, the elements of the tensor are functions of position and the tensor forms what is called a tensor field. This just means that the tensor is defined at every point within a region of space (or space-time), rather than just at a point, or collection of isolated points.
A tensor may consist of a single number, in which case it is referred to as a tensor of order zero, or simply a scalar. For reasons which will become apparent, a scalar may be thought of as an array of dimension zero (same as the order of the tensor).
In classical mechanics, moment of inertia, also called mass moment of inertia, rotational inertia, or the angular mass, (SI units kg·m2) is a measure of an object's resistance to changes to its rotation. It is the inertia of a rotating body with respect to its rotation. The moment of inertia plays much the same role in rotational dynamics as mass does in linear dynamics, describing the relationship between angular momentum and angular velocity, torque and angular acceleration, and several other quantities. The symbol I and sometimes J are usually used to refer to the moment of inertia or polar moment of inertia.
While a simple scalar treatment of the moment of inertia suffices for many situations, a more advanced tensor treatment allows the analysis of such complicated systems as spinning tops and gyroscopic motion.
Moment of inertia tensor
In three dimensions, if the axis of rotation is not given, we need to be able to generalize the scalar moment of inertia to a quantity that allows us to compute a moment of inertia about arbitrary axes. This quantity is as the moment of inertia tensor and can be represented as a symmetric positive semi-definite matrix, I. This representation elegantly generalizes the scalar case: The angular momentum vector, is related to the rotation velocity vector, ω by

and the kinetic energy is given by

as compared with

in the scalar case.
Like the scalar moment of inertia, the moment of inertia tensor may be calculated with respect to any point in space, but for practical purposes, the center of mass is almost always used.
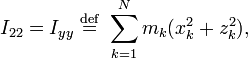
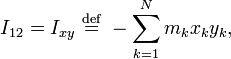
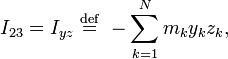
For a rigid object of N point masses mk, the moment of inertia tensor is given by
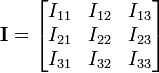 ,
, where



and I12 = I21, I13 = I31, and I23 = I32. (Thus I is a symmetric tensor.)
Here Ixx denotes the moment of inertia around the x-axis when the objects are rotated around the x-axis, Ixy denotes the moment of inertia around the y-axis when the objects are rotated around the x-axis, and so on.
These quantities can be generalized to an object with distributed mass, described by a mass density function, in a similar fashion to the scalar moment of inertia. One then has

where  is their outer product, E3 is the 3 × 3 identity matrix, and V is a region of space completely containing the object. Alternatively, the equation above can be represented in a component-based method. Recognizing that, in the above expression, the scalars Iij with
is their outer product, E3 is the 3 × 3 identity matrix, and V is a region of space completely containing the object. Alternatively, the equation above can be represented in a component-based method. Recognizing that, in the above expression, the scalars Iij with  are called the products of inertia, a generalized form of the products of inertia can be given as
are called the products of inertia, a generalized form of the products of inertia can be given as

The diagonal elements of I are called the principal moments of inertia.
Derivation of the tensor components
The distance r of a particle at  from the axis of rotation passing through the origin in the
from the axis of rotation passing through the origin in the  direction is
direction is  . By using the formula I = mr2 (and some simple vector algebra) it can be seen that the moment of inertia of this particle (about the axis of rotation passing through the origin in the direction) is
. By using the formula I = mr2 (and some simple vector algebra) it can be seen that the moment of inertia of this particle (about the axis of rotation passing through the origin in the direction) is  This is a quadratic form in and, after a bit more algebra, this leads to a tensor formula for the moment of inertia
This is a quadratic form in and, after a bit more algebra, this leads to a tensor formula for the moment of inertia
![{I} = m [n_1,n_2,n_3]\begin{bmatrix} y^2+z^2 & -xy & -xz \\ -y x & x^2+z^2 & -yz \\ -zx & -zy & x^2+y^2 \end{bmatrix} \begin{bmatrix} n_1 \\ n_2\\ n_3 \end{bmatrix}](http://upload.wikimedia.org/math/d/a/c/dacd5f0fa6ccbb3553e0d656e4a58b2f.png) .
. This is exactly the formula given below for the moment of inertia in the case of a single particle. For multiple particles we need only recall that the moment of inertia is additive in order to see that this formula is correct.
For any axis  , represented as a column vector with elements ni, the scalar form I can be calculated from the tensor form I as
, represented as a column vector with elements ni, the scalar form I can be calculated from the tensor form I as
The range of both summations correspond to the three Cartesian coordinates.
The following equivalent expression avoids the use of transposed vectors which are not supported in maths libraries because internally vectors and their transpose are stored as the same linear array,

However it should be noted that although this equation is mathematically equivalent to the equation above for any matrix, inertia tensors are symmetrical. This means that it can be further simplified to:

By the spectral theorem, since the moment of inertia tensor is real and symmetric, it is possible to find a Cartesian coordinate system in which it is diagonal, having the form

where the coordinate axes are called the principal axes and the constants I1, I2 and I3 are called the principal moments of inertia. The principal axes of a body, therefore, are a cartesian coordinate system whose origin is located at the center of mass. The unit vectors along the principal axes are usually denoted as (e1, e2, e3). This result was first shown by J. J. Sylvester (1852), and is a form of Sylvester's law of inertia. The principal axis with the highest moment of inertia is sometimes called the figure axis or axis of figure.
When all principal moments of inertia are distinct, the principal axes are uniquely specified. If two principal moments are the same, the rigid body is called a symmetrical top and there is no unique choice for the two corresponding principal axes. If all three principal moments are the same, the rigid body is called a spherical top (although it need not be spherical) and any axis can be considered a principal axis, meaning that the moment of inertia is the same about any axis.
The principal axes are often aligned with the object's symmetry axes. If a rigid body has an axis of symmetry of order m, i.e., is symmetrical under rotations of 360°/m about a given axis, the symmetry axis is a principal axis. When m > 2, the rigid body is a symmetrical top. If a rigid body has at least two symmetry axes that are not parallel or perpendicular to each other, it is a spherical top, e.g., a cube or any other Platonic solid.
The motion of vehicles is often described about these axes with the rotations called yaw, pitch, and roll.
A practical example of this mathematical phenomenon is the routine automotive task of balancing a tire, which basically means adjusting the distribution of mass of a car wheel such that its principal axis of inertia is aligned with the axle so the wheel does not wobble.
Once the moment of inertia tensor has been calculated for rotations about the center of mass of the rigid body, there is a useful labor-saving method to compute the tensor for rotations offset from the center of mass.
If the axis of rotation is displaced by a vector R from the center of mass, the new moment of inertia tensor equals
![\mathbf{I}^{\mathrm{displaced}} = \mathbf{I}^{\mathrm{center}} + m \left[ \left(\mathbf{R} \cdot \mathbf{R}\right) \mathbf{E}_{3} - \mathbf{R} \otimes \mathbf{R} \right]](http://upload.wikimedia.org/math/5/6/8/5685f05491ff00428551ec8ad91b5de0.png)

Prepraring for the competition made easy just by live online class.

Full Live Access

Study Material

Live Doubts Solving

Daily Class Assignments

Three identical balls are placed on a frictionless
horizontal surface touching each other. They stick to
each other because of adhesive. Another ball of same
radius and mass m is placed over the void created by
the three balls. Find the forces applied by the balls
kept on the floor to each other if the system remains
in equilibrium.
Last Activity: 7 Months ago
A car loaded with water having total mass 1000 kg moves on a straight horizontal Road starting from rest under the action of a force of 100 Newton. The water spills throw a small hole in the bottom at a rate of 0.1 KG per second the velocity of cart after 300 seconds is nearly.
11
21
31
41
Last Activity: 7 Months ago
Last Activity: 3 Years ago
Last Activity: 3 Years ago
Last Activity: 3 Years ago